




 [VIP第3年] 指数:1
[VIP第3年] 指数:1

BlueBotics公司开发的导航系统由多个部分组成,工作环境"地形图"采用一种类似于图的数据结构,其中的节点表示AGV执行的任务中所必须到达的各个位置。"地形图"含有环境的特征信息,可供机器人用于计算自己的当前位置,以及需要到达的目标点。
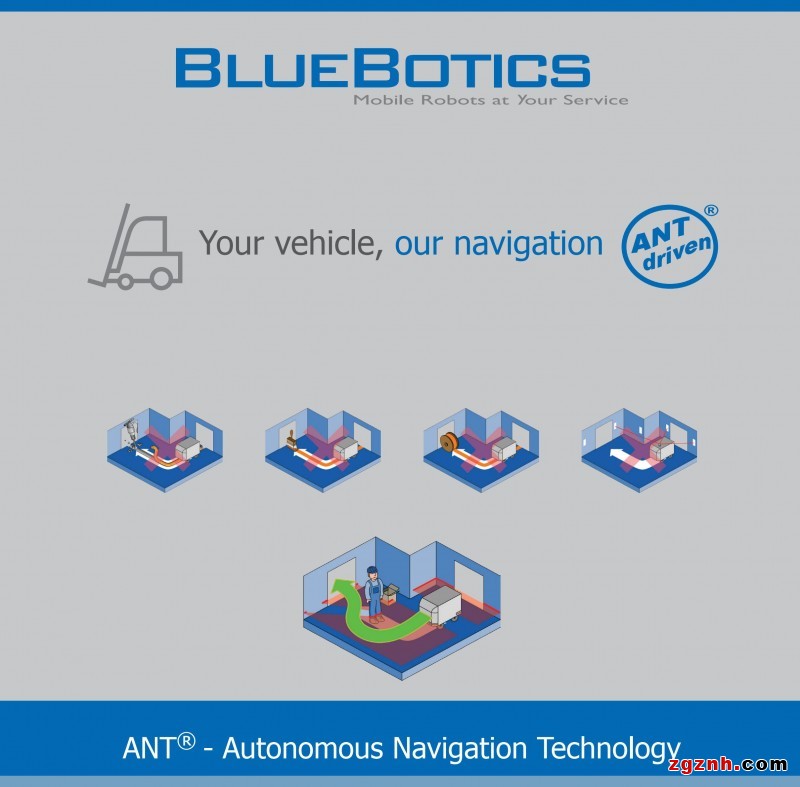
路径规划和运动算法工作于不同的抽象层面,可依据读取信息分为两个层面:轨迹跟踪和实时路径规划,这可以确保操作者选取一个速度,以允许机器人在撞上明显的障碍物之前就能够停下来。
作为一种选择,BlueBotics公司还提供了一种导航功能,可根据机器人周边的虚拟坐标网格提取传感器读数。该功能基于"橡皮筋"概念,本质上是以实时形变获取短小而平顺的路径,以保持和障碍物的间隔,从而允许AGV避开动态障碍。万一障碍物变得足以破坏AGV路径沿线的***小允许间隔,可调用该导航功能重新规划路径。
AGV在确定环境中发挥作用的能力源自其基于全局特征的多假设定位系统,这使得机器人能够获得很高的定位精度以及额外的好处,在机器人丢失定位轨迹的情况下,它能够产生关于自身当前位置的假设并自行完成再定位。
内建于AGV的安全系统可以保护人员、物体和机器人本身的安全,所有与机器人运行动作有关的部件都依据安全约束条件进行设计,包括了三个层面的安全考虑:操作系统、软件实现和硬件冗余。
根据客户的不同需求,可以通过无线通讯系统在AGV与处理ERP(企业资源计划)系统请求的运输经理之间实现通讯,或者让AGV直接与ERP系统相连。
获得ANT授权的系统可以实现设备兼容,而且事实上可以不受尺寸、容量和应用领域的限制。除用于运输之外,ANT还可以用于清扫、检查、研究、护理和监视系统。一套被称作"小矮人"的专用机器人单元拥有六个以电机驱动的轮子,可以胜任空间探索、营救和交战,目前正用于NASA,以及美国和加拿大的多个公司和大学。








 粤公网安备 44030702001206号
粤公网安备 44030702001206号