

 [VIP第3年] 指数:1
[VIP第3年] 指数:1

kr150-2 库卡机器人配件销售-广科智能技术有限公司
广科智能技术,
专业的机器人一站式采购商,
我司提供的机器人价格美丽,如果您发现比我司价格更低的公司,
我司可给您大限度的优惠,欢迎拨打我们的电话,
了解广科智能技术的一站式采购服务!完善的售后,
让您全程无忧!
广州市广科智能技术有限公司是一家
专业从事机器人销售、改造、备件、维保、培训等专业
技术服务型企业.主要涉及品牌有ABB、KUKA、安川、FANUC、
Kawasaki川崎、Panasonic松下、COMAU柯马、STAUBCI史陶、
比尔等及机器人,广科主力于打造全球首家机器人4S店
为理念服务型企业
从机器人选型、安装、调试、改造与无忧售后
和维保为客户提供全方面服务,实现工业机器人一-站式服务商。
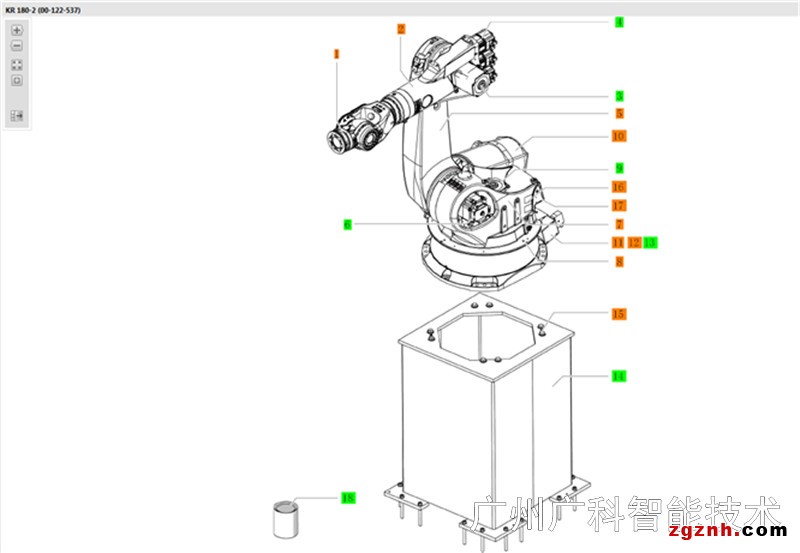
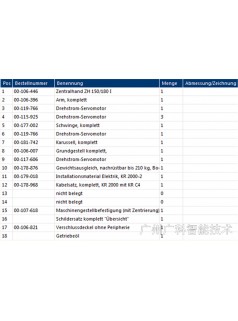
1 00-106-446 zentralhand ZH 150/180 I
2 00-106-396 Arm,komplett
3 00-119-766 Drehstrom-Servomotor
4 00-115-925 Drehstrom-Servomotor
5 00-177-002 Schwinge,komplett
6 00-119-766 Drehstrom-Servomotor
7 00-181-742 Karussell,komplett
8 00-106-007 Grundgestell,komplett
9 00-117-606 Drehstrom-Servomotor
10 00-178-876 Gewichtsaus gleich,nachrustbar bis 210 kg
11 00-179-018 Installationsmaterial Elektrik,KR2000-2
12 00-178-968 Kabelsatz,komplett,KR2000 mit KR C4
13 nicht belegt
14 nicht belegt
15 00-107-618 Maschinengestellbestigung [mit Zentrierung]
16 Schildersatz Komplett ‘ubersicht’
17 00-106-821 Verschlussdeckel ohne Peripherie
18 Getriebeol
1 00-106-446中央手ZH 150/180 I
2 00-106-396手臂,完成
3 00-119-766三相伺服电机
4 00-115-925三相交流伺服电机
5 00-177-002 Swingarm,完成
6 00-119-766三相伺服电机
7 00-181-742旋转木马,完成
8 00-106-007基本框架,完成
9 00-117-606三相伺服电机
10 00-178-876重量相等,可加装210公斤
11 00-179-018电气安装材料,KR2000-2
12 00-178-968电缆套件,完整,KR2000与KR C4
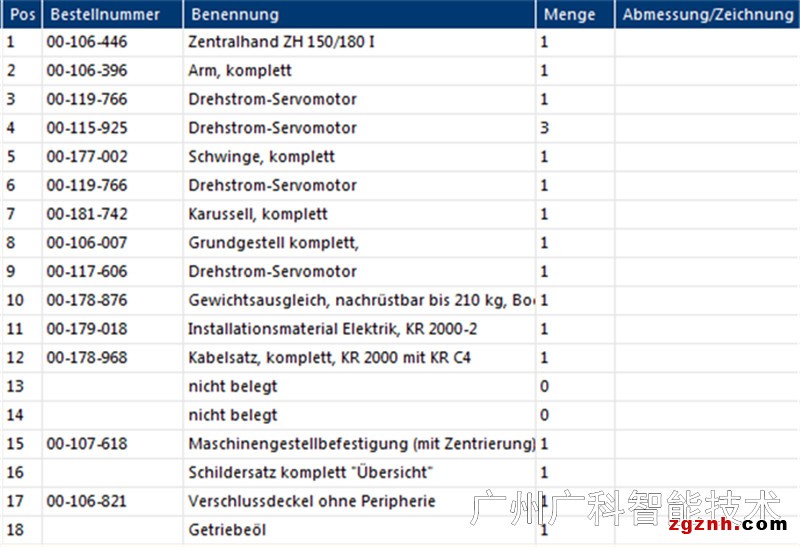
13没有分配
不使用14
15 00-107-618机架支架[带定心]
16完成集“概述”
17 00-106-821没有周边的封盖
18变速箱油
降低工业机器人伺服电机表面振动的方法
降低工业机器人伺服电机表面振动的方法
简介:1)添加激振力波次数(力波极对数)。增大由谐波磁场产生的径向力波次数,首要靠合理挑选定转子槽合作完成。
(2)使首要的激振力频率与工业机器人伺服电机构造的固有振荡频率错开,为此要断定定子构造、转子体系与端盖的固有频率,并把这些固有频率与首要激……
1)添加激振力波次数(力波极对数)。增大由谐波磁场产生的径向力波次数,首要靠合理挑选定转子槽合作完成。
(2)使首要的激振力频率与工业机器人伺服电机构造的固有振荡频率错开,为此要断定定子构造、转子体系与端盖的固有频率,并把这些固有频率与首要激振力频率进行对比。
(3)添加定子铁轭厚,以进步其刚度。
(4)加入阻尼资料,以添加工业机器人伺服电机构造的阻尼功能。用清漆或环氧树脂把定子叠片彻底粘在一同,并填充铁心与机座之间的间隙,就能增大工业机器人伺服电机构造的阻尼。
(5)调理定子叠片铁心与机座之间的机械衔接,使机座振荡小。这种办法仅适用于大型和中型工业机器人伺服电机,这种情况下工业机器人伺服电机的内铁心和外机座用弹性元件衔接。
机器人 伺服 工业 电机 方法 降低 表面 添加 激振 振动ABB伺服电机机座首要加工技术要求_ABB机器人维修,机器人示教器维修,机器人保养,广州广科机器人






 粤公网安备 44030702001206号
粤公网安备 44030702001206号