
 [VIP第3年] 指数:1
[VIP第3年] 指数:1


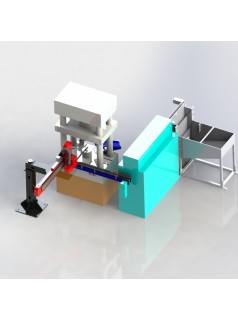
单机多轴机械手的执行机构由手、手腕、手臂以及支柱组成。手是抓取机构,用来夹紧和松开工件,与人的手指相仿,能完成人手的类似动作。手腕是连接手指与手臂的元件,可以进行上下、左右和回转动作。简单的机械手可以没有手腕。支柱用来支撑手臂,也可以根据需要做成移动。

|
公司基本资料信息
|
|||||||||||||||||||||||||||||||||
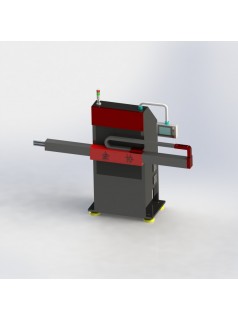
单机多轴机械手的执行机构由手、手腕、手臂以及支柱组成。手是抓取机构,用来夹紧和松开工件,与人的手指相仿,能完成人手的类似动作。手腕是连接手指与手臂的元件,可以进行上下、左右和回转动作。简单的机械手可以没有手腕。支柱用来支撑手臂,也可以根据需要做成移动。
中国智能化网(zgznh®)--引领工业智能化产业发展 共享智能化+优质平台
版权所有:深圳市智控网络有限公司 学术指导:深圳市智能化学会
粤ICP备12078626号
深公网安备案证字第 4403101901094 号 |  粤公网安备 44030702001206号
粤公网安备 44030702001206号