
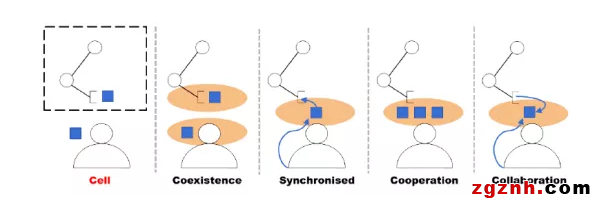
在这种情况下,机器人与人类共享相同的工作空间,并进行工业活动,例如原材料处理,组装和工业产品转移。传统的方法是使人类在有限的范围内接触机器人,并采用适当的安全控制措施,以防工人进入机器人的工作区而导致机器完全停止,一旦进入,会导致中断和重置程序被激活,延长生产时间。随之出现了新提议的方法,即安全的人机协作(HRC),没有任何围栏。为了实现这一点,需要采用协作式机器人网络物理系统(CPS)实施额外的安全和保护措施,这要求基于人与机器人之间的交互程度,确保安全性,并提高生产率。实际上,协作机器人网络物理系统的设计方法是将安全性和安全性问题进行合并,就像设计同时考虑这两个方面的工业设施,下图是协作型机器人的几种应用类型。
协作机器人网络物理系统是一种智能系统,其中集成了计算和物理系统,以控制和感知现实世界变量的变化状态。这种CPS的成功取决于可靠,安全和可靠的传感器网络和通信技术。CPS平台不断发展其架构,以跨越数字物理鸿沟进行工程设计,并消除了关键技术之间的界限。特别是,其中包括电子,计算,通信,传感,驱动,嵌入式系统和传感器网络等。CPS模型中主要包括三个组成部分,人为成分,物理成分和计算成分。
这三者是集成在一起的三个模块。随着使能技术的发展,这三个组成部分之间的互动越来越多,彼此之间通过不同的技术连接在一起,例如,人体位置跟踪和安全距离参数是机器人CPS中工作人员安全的重要考虑因素。机器人系统是高度自动化的系统,消除了元素之间的边界,通过交互加以彼此连接。有多种基于人的视觉,听觉和触觉的人机交互技术。机器人CPS可以使用视觉系统来检测,跟踪和手势识别人类,也可以使用来自人类的音频信号命令机器人。各类传感器和执行器可以使三者之间产生多种不同的交互方式。
在人机协作中,会在CPS中应用多种传感器,以确保安全性。传统方法是手动提供指导或根据要求降低机器人速度,该类方法多为开环的,其人机协作的水平取决于应用现场的风险评估,而且局限于小型机器人的应用。第二种安全方法是指定一个工作区,该工作区被激光扫描仪或接近传感器之类的传感器覆盖。在这种情况下,机器人必须在人员进入工作区域时停下来。该系统是传感器相关的闭环系统,但是几乎没有达到人机协作的操作目的,如下图所示。第三种方法是通过基于视觉的系统或其他可能的技术进行速度或距离监视。如果工人进入危险区域,机器人可能会减速甚至停机,其中使用了多种集成传感器和传感器融合技术,极有可能达到较高的人机协作水平,但是如果监视功能失败,则也会带来一定的风险。最后一种方法是通过使用力传感器进行力监控。机器人的速度和加速度的降低将根据允许撞击工人身体部位的力的大小来进行。力大小会因身体不同部位而异。该方案提供了最高水平的人机协作程度,但是还要求集成多种类型的传感器,融合传感器,并在监视功能失败的情况下对风险评估提出挑战。

通过上述几种不同的协作技术和相应的人机协作水平,研究人员正式确定人机协作评分方案和衡量标注。其一是计算安装在CPS系统中的传感器数量。其二是单个传感器或同一类型传感器组的数据速率,因为每个传感器的延迟时间都取决于整个系统的响应时间。因此,系统的总体延迟时间是关键性能指标,使机器人能够及时启动安全协议以应对任何危险,较大的延迟时间会对机器人的反应时间产生不利影响,从而降低人机协作的水平。下图是人机协作安全的等级图。
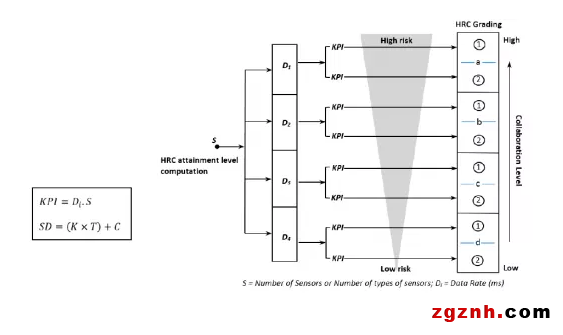
因此,在CPS中要评估可以达到的人机协作的水平,有必要在给定的协作环境中计算指标。在应用各类传感器,需要明确CPS中人员和机器人的位置,以及相应的应用场景。例如,可以用于与其他传感器关联的位置信息的视觉传感器必须在足够的照明条件下工作。此外,为了更快,更准确地响应机器人,通信必须更快,最好通过短距离,安全的无线网络进行。总体而言,系统必须符合相关的安全标准。对于速度和距离监视情况,除了基本区域和位置监视传感器系统外,还使用惯性测量单元(IMU)。同样,对于基于力监控的人机协作系统,除了力传感器之外,基本区域和位置监控对于实现人机协作也是必需的。在力监控中,可以使用不同类型的几何形状适合的触觉传感器来安装在机器人上或机器人关节中,这些传感器具有减震特性,可以安全地进行碰撞检测和基于触摸的交互。也可以使用不同区间的力传感器来评估单独人体部位的受力极限。
人机协作中除了特定解决方案中所采用的传感器技术外,还可能存在多个可以建立通用解决方案或指南的工业场景。这些工业场景范围包括从单个机器人到与多个人工一起工作的多个机器人构成人机协作系统。这其中可能包括使用惯性传感器,视觉,雷达或用于人类位置监测的任何混合方法。混合方法可以结合使用两种及以上方法,可以高精度地执行任务,因为来自多个单独的传感器系统的定位信息将相互配合并补偿错误。此外,在给定的情况下,不同的传感器在某些技术领域可能更实用,例如摄像机遇到视觉障碍时将无法运行。在这种情况下,其他技术传感器将保持系统功能。
随着机器人逐渐向着开放性空间发展,越来越多的机器人采用视觉信息处理及技术。例如,相关研究人员结合多传感器信息融合技术,基于立体摄像机采集工作单元数据,系统检测环境中的人员与机器人,并根据本体位置和轨迹生成动态危险区域。有研究基于深度传感器建立深度空间方法,通过估计机器人与静态和移动障碍物间的距离,进而将这种实时距离测量及障碍物速度估计信息与基于排斥力矢量的控制器一起用作防撞技术。此外,也有研究基于行为预测和图像数据信息,通过RGB输入的数据和标准化活动描述矢量来消除对定时或时间序列信息的需要,进而预测人体活动行为,避免碰撞。针对视觉采集过程中可能存在的物体遮掩问题,有研究人员基于机载传感方法,开发了一种分布式距离传感器,并优化了机器人本体传感器最佳装配位置,一定程度上降低了非结构环境下碰撞事件的发生。
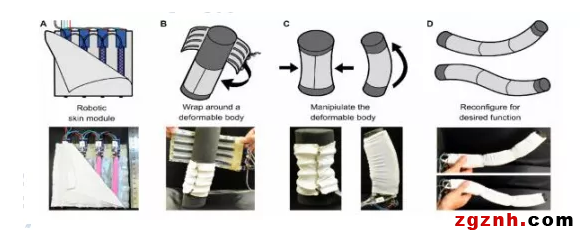
机器人皮肤是基于传感原理和设计技术(如电阻,电容,压电,声学等)对传感技术进行不同的分类,可以通过关注触觉信息处理来进行不同的设计,如下图所示。一个有趣且有用的发展方向是机器人的皮肤,可以提供丰富而直接的反馈,使机器人系统能够通过多个接触点识别物体。1).基于皮肤的光学传感器:基于皮肤的光学传感器的总体思路是开发一种能够提供触觉和视觉信息的多模式传感器。有鉴于此,一些研究人员提议用不透明的材料覆盖传感器的皮肤表面,以阻止外界光线进入传感器。但是,使用不透明的材料会限制视觉传感器提供的信息,因此使他们只专注于触觉信息。为了解决这个问题,有研究人员提出了一个由透明皮肤,照相机和彩色标记组成的原型,可提供高分辨率的接触力和近距离视觉。2).基于皮肤的软传感器:各种常规的柔性传感器都面临着降低传感器灵敏度的技术问题。例如,
老化和机械应力会导致磁滞现象并降低传感器的灵敏度。为了应对这一挑战,有人提出了一种磁流变触觉传感器,该传感器由柔性的上层和下层弹性体组成。弹性片上的变形会引起磁通量的变化,从而影响传感器的空间响应。
安全交互问题作为机器人交互融入大众日常生活的基本要求,而传感技术作为人机协作研究中的一部分,其研究和应用意义重大,为实现“中国制造2025”,构建新型工业体系和智能家园蓝图,人机协作安全和传感器技术的研究需要进一步完善相关的学科研究和产业技术。
 粤公网安备 44030702001206号
粤公网安备 44030702001206号