



 [VIP第3年] 指数:1
[VIP第3年] 指数:1



1.DMC640M的硬件性能
DMC600M系列DMC640M运动控制器,其硬件结构基于高性能 DSP 为控制核心、FPGA 协处理,插补算法、脉冲信号产生及加减速控制、I/O 信号的检测处理,均由硬件和固件实现,确保了运动控制高速、高精度及系统稳定。可控制 4个步进或伺服电机,具有四轴直线插补、圆弧插补并其他轴联动、加速曲线自动控制等高级功能。固件已嵌入 DMC 运动控制指令系统,该指令系统功能强大、应用灵活、使用简单。
2. 机械手上下料的运动轨迹
AAA客户的生产线上需要使用机械手上下料,结构如图1所示。X轴执行水平左右运动,Y轴执行竖直上下运动,手爪由气缸控制执行抓取动作。它们的任务是将右侧工装上的工件依次抓取至左侧传送带上。X轴原点距离传送带上工件放置点为W,工装上个工件距离传送带上工件放置点为S,工装上每个工件之间的距离均为L。
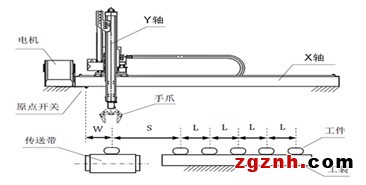
图1 机械手上下料系统组成
通常大多数用户会将X、Y的运动轨迹确定为矩形,即Y轴上下运动完成后X轴再水平运动,然后Y轴再次上下运动,如此反复进行。但这样的方式会导致比较强烈的抖动,并且造成一定的时间浪费。因此,可采用图2所示的运动轨迹,在2个拐弯处,X、Y轴进行一段半径为R的圆弧插补运动,这样可大大减弱抖动,且能节省时间。A点为起始点,抓取并放置第1个工件的路径为A→B→C→D→E→F→G→H→I→J→K,抓取并放置第2个工件的路径与个相同,只不过A→B和F→G的距离增加了长度L,第3个、第4个、第5个亦然。
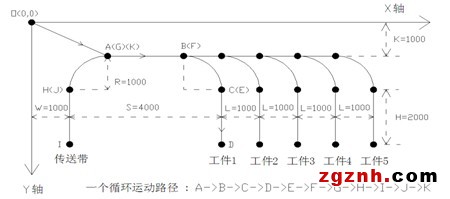
图2 机械手上下料运动轨迹
DMC640M支持连续插补运动,在连续插补模式下,速度是连续的,各插补段之间没有加减速过程,从而使得运动更加平滑。
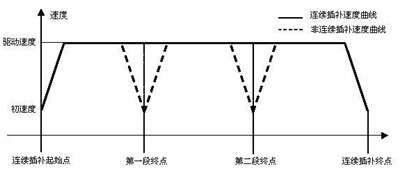
图3 连续插补运动




 粤公网安备 44030702001206号
粤公网安备 44030702001206号