[VIP第3年] 指数:1
[VIP第3年] 指数:1


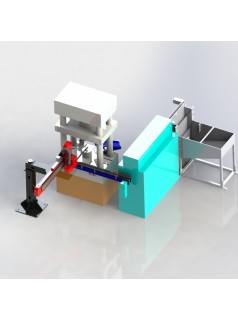
SCARA机器人的前两个关节可以在水平面上左右自由旋转。第三个关节由一个称为羽毛(quill)的金属杆和夹持器组成。该金属杆可以在垂直平面内向上和向下移动或围绕其垂直轴旋转,但不能倾斜。
这种独特的设计使四轴机器人具有很强的刚性,从而使它们能够胜任高速和高重复性的工作。在包装应用中,四轴机器人擅长高速取放和其他材料处理任务



|
公司基本资料信息
|
|||||||||||||||||||||||||||||||||
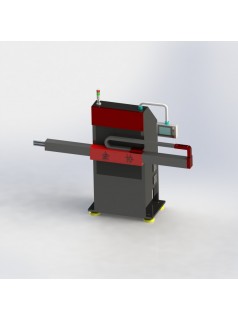
这种独特的设计使四轴机器人具有很强的刚性,从而使它们能够胜任高速和高重复性的工作。在包装应用中,四轴机器人擅长高速取放和其他材料处理任务
中国智能化网(zgznh®)--引领工业智能化产业发展 共享智能化+优质平台
版权所有:深圳市智控网络有限公司 学术指导:深圳市智能化学会
粤ICP备12078626号
深公网安备案证字第 4403101901094 号 |  粤公网安备 44030702001206号
粤公网安备 44030702001206号